



优傲UR10机器人
优傲UR10机器人
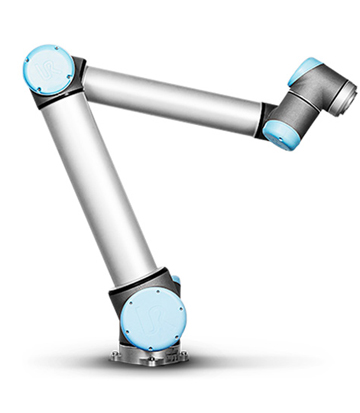
UR10型六关节机器人采用模块化设计,每个关节运动范围+-360度;机械臂自重只有28.9公斤,有效负载达到10公斤,工作范围1300毫米,安装尺寸只有直径190毫米;最大工具端运行速度3米/秒,重复定位精度+-0.03毫米;机器人I/O信号包括数字和模拟信号,通讯采用满足TCP/IP MODBUS协议的。
 产品介绍
产品介绍 产品参数
产品参数
UR10型六关节机器人采用模块化设计,每个关节运动范围+-360度;机械臂自重只有28.9公斤,有效负载达到10公斤,工作范围1300毫米,安装尺寸只有直径190毫米;最大工具端运行速度3米/秒,重复定位精度+-0.03毫米;机器人I/O信号包括数字和模拟信号,通讯采用满足TCP/IP MODBUS协议的。
以太网通讯;示教器采用12寸触摸屏,运行PolyScope图形用户程序;机器人控制箱电源为220VAC,运行典型程序消耗功率只有350W;机器人工作环境温度范围为0度-50度。
UR10型六关节机器人具有轻松编程、快速安装和设置、重新部署灵活、人机协作和安全等特点,机械臂有反向驱动功能,可以直接牵引机械臂编程示教;可以通过设置安全参数,并经过安全评估,在不增加安全围栏条件下满足人机协作应用需求。
UR10型六关节机器人作为轻量化、小型化、人机协作机器人尤其适用于电子、家电和3C行业的装配、机床上下料、物料检测、物品取放、堆垛和拆垛、打磨和抛光等领域。
UR10 技术详情
 |
 |
 |
 |
|
|
|
|
|
|
半径 |
有效载荷 |
占地面积 |
重量 |
|
1300 毫米 / 51.2 英寸 |
10 千克 / 22 磅 |
Ø 190 毫米 |
33.5 千克 / 73.9 磅 |





